Ehh. Filmides on siiani kõva sõna infrapuna. Et kui mingi vidina töös/nimes/kirjelduses on see olema siis peaks olema ülivinge vidinas. Krüpto ja sagedushüppamine on selle kõrval aga juba tuumafüüsika hiina keeles.Viiskümmend kirjutas: ↑09 Mai, 2024 18:47 See, et sagedushüppamine ja krüpteerimine kuidagi segamise vastu aitaks on ikkagi rohkem visa müüt ja müügijutt.
GPS-i häkkimine
-
_dumbuser_
- Liige
- Postitusi: 2367
- Liitunud: 14 Jaan, 2011 0:37
- Kontakt:
Re: GPS-i häkkimine

Re: GPS-i häkkimine
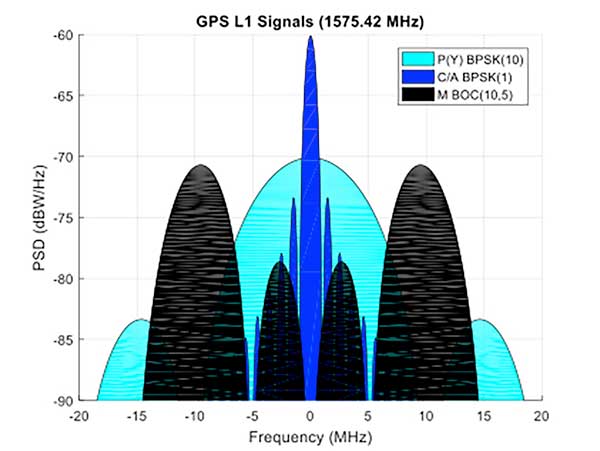
Militaarkasutuses olevast M-koodist
https://www.gpsworld.com/new-military-c ... platforms/
Ilusat graafikat, millest on lihtsam aru saada.
C/A koodid on tsiviil- ja militaarkasutuses.
P/Y koodid on ainult militaarakasutuses.
M kood on ainult militaarakasutuses.



*
GPS Jamming: How it Works, Methods of Prevention.
https://www.defenseadvancement.com/wp-c ... ention.pdf
https://www.gpsworld.com/new-military-c ... platforms/
Ilusat graafikat, millest on lihtsam aru saada.
C/A koodid on tsiviil- ja militaarkasutuses.
P/Y koodid on ainult militaarakasutuses.
M kood on ainult militaarakasutuses.
*
GPS Jamming: How it Works, Methods of Prevention.
https://www.defenseadvancement.com/wp-c ... ention.pdf
-
Viiskümmend
- Liige
- Postitusi: 2110
- Liitunud: 04 Aug, 2010 12:33
- Kontakt:
Re: GPS-i häkkimine
GPSi kaitsmisel on abi saadud FRPA/CRPA antennitehnoloogiatest aga tänapäevased segamistehnoloogiad on samuti väga kiiresti arenenud ja targad.

Re: GPS-i häkkimine
Nädalavahetusel läheb huvitavaks. Lisaks virmaliste mängule võib tulla elektroonikaga probleeme. GPS-i ja raadiosignaalide segamisele hakkab vahele segama suur päikesepurse(vähemalt 5 tk. toimus lühikese aja jooksul). Kohale jõuab umbes 1-2 ajal öösel meie aja järgi.
https://twitter.com/DrEricDing/status/1 ... 1871153535
INBOUND SOLAR STORMS—5x mega coronal mass ejections - CMEs - that can knock out power are going to be slamming at Earthbetween Friday and Sunday this weekend. Earth has only been hit with 3 previous severe CMEs in last 4 years. But we are gonna get 5x G4 CMEs in 3 days!
Let this sink — this is the first GEOMAGNETIC STORM WATCH since 2005!
Folks - this is serious - it can knock out not only electricity but it can theoretically knock out airplanestoo!
Folks- it’s possible. Not only can it cause higher radiation and knock out communications, but a strong CME can knock out airliner avionics. “according to reports by aviation regulators, the issue is not whether it will happen, but when”
that said this is a severe G4 “a category 4” CME storm, not the highest G5 “extreme” CME that was the infamous “Carrington Event” of 1859.
“The Carrington Event was category 5 or greater. So this is no Carrington Event. Even so, category 4 is pretty intense”.…
NOAA spokesman says that we won’t know the precise strength of each arriving CME until within **20-40 minutes** of each storm wave’s arrival (thanks to NASA space satellitespositioned 1 million miles ahead of each on the Earth-Sun path).
Reporter: “What is the worst case situation?”
NOAA spokesman: “TOUGH TO SAY, I DON’T WANT TO SPECULATE… WORST SITUATION WOULD LIKE 1859 CARRINGTON EVENT… We don’t want to discount G5 event, but possibly low level G5 possible. Likely G3-4”.
NOAA spokesman: “TIMING OF ARRIVAL 8PM EASTERN TONIGHT (approximately)”
Friday 8pm US ET.
“We need to know magneticfield - if the magnetic shock is same positive as North Pole, it won’t do much. But if opposite field, we will see effects”.
Hence hard to predict effects.
NPR reporter: “Can you explain how CME can affect Earth” “and how big?”
NOAA: “Sunspot 16x diameter of Earth. CME can affect magnetic field and induce electrical current (in our electrical systems)” (and hence overload electrical systems).
CHANCE OF ANOTHER CARRINGTON EVENT:
NOAA scientist spokesperson: “Hard to know. Our models say between 2-12%”
Quote BN
 between Friday and Sunday this weekend. Earth has only been hit with 3 previous severe CMEs in last 4 years. But we are gonna get 5x G4 CMEs in 3 days!
between Friday and Sunday this weekend. Earth has only been hit with 3 previous severe CMEs in last 4 years. But we are gonna get 5x G4 CMEs in 3 days!
 too!
too! positioned 1 million miles ahead of each on the Earth-Sun path).
positioned 1 million miles ahead of each on the Earth-Sun path). field - if the magnetic shock is same positive as North Pole, it won’t do much. But if opposite field, we will see effects”.
field - if the magnetic shock is same positive as North Pole, it won’t do much. But if opposite field, we will see effects”.  Hence hard to predict effects.
Hence hard to predict effects. NOAA scientist spokesperson: “Hard to know. Our models say between 2-12%”
NOAA scientist spokesperson: “Hard to know. Our models say between 2-12%” https://twitter.com/DrEricDing/status/1 ... 1871153535
Viimati muutis ruger, 10 Mai, 2024 20:02, muudetud 1 kord kokku.
Ainus, mida me ajaloost õpime, on see, et keegi ei õpi ajaloost midagi.
Live for nothing or die for something.
Kui esimene kuul kõrvust mõõda lendab, tuleb vastu lasta.
EA, EU, EH
Live for nothing or die for something.
Kui esimene kuul kõrvust mõõda lendab, tuleb vastu lasta.
EA, EU, EH
Re: GPS-i häkkimine
Juba möllab.Sellel lehel saab sisuliselt reaalajas andmeid.
https://www.ilmatieteenlaitos.fi/revont ... avaruussaa
https://www.ilmatieteenlaitos.fi/revont ... avaruussaa
Re: GPS-i häkkimine
virmalised.ee lehelt saab kohalikus keeles ka infot.
Re: GPS-i häkkimine
Mul kogub Tallinnas kahesageduslik GPS/GLONASS vastuvõtja 24/7 andmeid ja salvestab need RINEX formaadis. Vajadusel saab ka RTCM või NMEA formaadis real-aja andmed.
Kui keegi tahab neid andmeid kasutada hobikorras mingi jamming/spoofing/päikseplahvatused/misiganes mõju analüüsimiseks, siis olen nõus lahkelt jagama.
Tingimusel, et ma ka tulemuse raporti saan.
Kui keegi tahab neid andmeid kasutada hobikorras mingi jamming/spoofing/päikseplahvatused/misiganes mõju analüüsimiseks, siis olen nõus lahkelt jagama.
Tingimusel, et ma ka tulemuse raporti saan.
Re: GPS-i häkkimine
Ma pakun, et Leica AT504 GG Saku Vallavalitsuse korstna otsas...
Fucs OSINT pakuks seda
Vbl kedagi huvitab:
STV täpismoonast ja selle probleemidest.
Mürsud.
2.1 Ülehelikiiruse faas
Joonisel 2.1 toodud näites on mürsu algkiirus 835 m/s (mis on merepinnal 2,5 Machi lähedal) ja mürsu kiirus on lennu esimesel kolmandikul ülehelikiirusel. Seda osa nimetatakse ülehelikiiruse faasiks; pärast seda liigub mürsk allahelikiirusel.
Ülehelikiiruse faasis on dünaamiline rõhk kõrge ja seetõttu on aerodünaamiliste juhtpindade efektiivsus märkimisväärne. See on ka faas, kus väikesed juhtimissisendid (jõud, momendid) avaldavad löögipunktile suurt mõju. Teisest küljest, kuna suurem osa lennutrajektoorist on allahelikiirusega, on mõistlik optimeerida juhtpinnad allahelikiiruse jaoks ja transoonilised aerodünaamilised efektid võivad raskendada selliste pindade töötamist ülehelikiiruse faasi lõpus.
Ülehelikiiruse faas on trajektoori osa, kus mürsk on relvale kõige lähemal ja kus on kõige lihtsam andmeid üles linkida. Üleslingi andmed võivad hõlmata mürsu tegeliku algkiiruse mõõtmisi ja mürsu asukoha ja kiiruse radarimõõtmisi. See on ka osa, kus iga inertsiaalset navigatsioonisüsteemi (INS) saab ja tuleks lähtestada ning kus GPS saab hakata satelliidiandmeid hankima.
2.2 Tipuetapp
Pärast ülehelikiiruse faasi, kui mürsk on läbinud transoonilise õhukiiruse piirkonna, ei ole õhukiiruse (ja seega ka aksiaalse kiirenduse) muutus enam dramaatiline. See tähistab lennutrajektoori keskmise kolmandiku algust, mida me nimetame tipuetapiks. Selle faasi alguses on dünaamiline rõhk ja pöörlemiskiirus endiselt kõrged, mis tähendab, et mürsul on nii aerodünaamiliste juhtpindade tõhusus kui ka hea güroskoopiline stabiilsus. Need tingimused kehtivad üldiselt kogu tipuetapis.
2.3 Lõppfaas
Terminali faas on lennutrajektoori viimane kolmandik. Selle etapi jooksul on tsentrifuugimise kiirus langenud tasemeni, kus seda tuleb olemasoleva kontrollkeskuse arvutustes arvesse võtta. Tõepoolest, saadaolevad kontrollkeskused on selles faasis üldiselt piiratud mürsu güroskoopiliste stabiilsusomadustega. Veelgi enam, just selles faasis on GPS signaali segamise/summutamise tõenäosus suurim, kui navigeerimiseks kasutatakse GPS-i.
3 Pöörlevate suurtükimürskude juhtimine
Juhtimis- ja juhtimisprobleemil keerlevate mürskude puhul, kus juhtajamid on piiratud otsale (sütikule) paigaldatud juhtimissõlmega, on mõned erinevad omadused, mis eristavad seda muud tüüpi raketijuhtimisseadmetest. Esiteks ei ole mürsk mõeldud juhtimiseks ja juhtajamid ei ole dünaamika suhtes ideaalselt paigutatud. See tähendab, et üldine dünaamika süntees (st loomuliku avatud ahela dünaamika "asendamine" soovitud suletud ahela dünaamikaga) ei ole antud juhul üldiselt võimalik ja võib eeldada, et mürsu loomulikus dünaamikas on juhtimisega saavutatavad vaid väikesed muutused.
Eelkõige ei saa enamasti looduslikke (güroskoopilisi) stabiilsuspiire muuta ja stabiilsusomadusi võib halvendada mürsu otsa paigaldatud juhtimismehhanismide lisamine. Sel põhjusel on üldiselt mõistlik eeldada, et otsikule kinnitatud navi- ja juhtimissõlm võib tagada trajektoori korrigeerimise.
3.1 Trajektoori korrigeerimine
3.1.1 Füüsilised piirangud
Juhitava mürsu juhtimise, navigeerimise ja juhtimise (GNC) ning käitamiskomponentidele seatakse tõsised piirangud. Näiteks suur löök, mis on põhjustatud lasu käivitamisel, kõrged pöörlemiskiirused, ühilduvus- ja integratsiooniprobleemid erinevate alaosade vahel, arvestades suuruse ja kaalu piiranguid jne. Ballistiliste mürskude manööverdusvõime on oma olemuselt väga piiratud, manööverdamissüsteemi keerukus tuleb hoida madal, tõenäoliselt ilma aktiivse summutamise võimeta (stabiilse dünaamika sünteesimiseks). Kontrollimehhanismid peavad siiski olema piisavad, et mingil määral leevendada nii ballistilise hajumise vigu kui ka atmosfäärimõju. Juhtimisalgoritm peaks eeldatavasti järgima võimalikult lähedalt ballistilisi trajektoore, et vältida energia raiskamist ja minimeerida piiratud kontrollikeskuse koormust.
Nagu ülalpool mainitud, võib mürsk olla kas pöörlemis-stabiliseeritud või juhtpindadega (tiibadega) stabiliseeritud. Esimesel juhul on tsentrifuugimise kiirus nii kõrge (sadu Hz), et stabiliseerimine saavutatakse "güroskoopilise toimega". Saadud dünaamika võib olla väga keeruline, näidates märkimisväärset vahemiku triivi, mis on tingitud gravitatsiooni, kaldemomendi ja pöörlemise vastastikusest mõjust. Mõnikord võivad trajektoorid oma lõppfaasis dünaamiliselt ebastabiilseks muutuda. Tiibadega stabiliseeritud mürskude puhul tagavad stabiilsuse aerodünaamilised pinnad, mille tulemuseks on rõhukese raskuskeskmest tagapool. Pöörlemissagedus on palju madalam (0-30 Hz) ja dünaamika on paremate omadustega. Liiga suurte külgmomentide (külgsuunaliste juhtimisjõudude) rakendamisel võib ikkagi tekkida koonusliikumine, kuid mittepöörlevat lendkeha on lihtsam dünaamiliselt stabiilsena hoida ja manööverdamissüsteemi konstruktsioon on palju suurem kui pöörlemisega stabiliseeritud mürskude puhul.
3.1.2 Juhtmehhanismid
Tavalist juhtimismehhanismi pakuvad mürsu ninasse paigaldatud liigutatavad tiivad. See annab kursiparandusi nii üles-alla kui ka ristsuunas (2D). Pöörlemisstabiliseeritud mürskude puhul peab juhtpindadekomplekt saama iseseisvalt pöörelda, et see langeks madalamatele pöörlemiskiirustele, mis vastavad täiturmehhanismide ribalaiusele. See ei ole tiibadega stabiliseeritud mürskude puhul vajalik (arvestades nende niigi mõõdukat pöörlemiskiirust), mis lihtsustab oluliselt konstruktsiooni.....
4 Juhised
Kolm peamist juhiste tüüpi, mida juhitava laskemoona kontekstis kõige sagedamini kasutatakse, on trajektoori kujundamine, trajektoori ennustamine ja trajektoori jälgimine. Kuna trajektoori kujundamise tehnikad on üldiselt energiatõhusad ja kõige sagedamini kasutatavad lõpptingimuste täitmiseks (välja arvatud lõpp-punkt), siis trajektoori kujundamist siinkohal ei käsitleta.
4.1 Ennustav juhendamine
Ennustavas juhises (PG) kasutatakse igas juhiste värskendamise hetkes mürsu ja keskkonna mudelit, et arvutada välja juhtimistoimingute jada, mis annaks praeguse oleku korral sihtmärgini viiva lennutrajektoori. Kui mudelis ja mõõtmistes pole vigu (ja kõik olekud on mõõdetavad), piisab sellest ühest juhise arvutamise hetkest ja sellest tulenevast juhtimistoimingust, et anda lennutrajektoori, mis viib mürsu kuni sihtmärgini. Kuid tegelikkuses on lennu ajal vaja teha vähemalt paar sellist arvutust koos kaasneva trajektoori parandusega.
4.2 Trajektoor ja teekond vastavalt juhistele
Juhtimisjärgsel trajektooril on esmalt arvutatud nominaalne trajektoor stardipunktist sihtmärgini, mis juhul, kui parameetritel ja algväärtustel on kõigil olemas kõik oma nimiväärtused, annaks algse baaskauguse. Sellist trajektoori nimetatakse lubatavaks (kuna see vastab lõpptingimusele; trajektoor, mis ei lõpe sihtmärgiga, on seega lubamatu). Seejärel püüab kontroller viia mürsu vastavale sihtmärgini viivale trajektoorile. Siiski on oluline mõista, et trajektoor on (matemaatiliselt) sujuv kaart ajaintervallist kolmemõõtmelise ruumini, st see määrab igal ajahetkel mitte ainult asukoha, vaid ka kiiruse, mis mürsul peaks olema. Kuid mürsu toomine trajektoori ruumis olevale lennurajale (rada on ajaintervalli trajektoorikaardi all olev kujutis) ei tähenda tingimata, et mürsul on õige kiirus, kui see teekonna lõpp-punkti saabub. Seetõttu ei tähenda mürsu rajale toomise kontrollieesmärgi täitmine kohe tingimata vastavat ettenatud baaskaugust.
Mürsu trajektoori järgimise ja mürsu teekonna jälgimise mõistete erinevust illustreerib joonis 4.1. Sel põhjusel viitame siin suunamisviisile, mille eesmärk on paigutada mürsk sihtmärgini etteantud (eelarvutatud) rajale (ilma kiirust selgesõnaliselt arvesse võtmata) kui teekonnale järgnevat juhtimist (PFG). Veelgi enam, juhitavate mürskude puhul muutub trajektoori mõiste tegelikult trajektooride perekonnaks; kõik need, mida on võimalik realiseerida mürsu dünaamika erinevate modifikatsioonide abil juhtimistegevuse kaudu. (Sihtkohas lõppevad trajektoorid on lubatud)....
https://www.foi.se/rest-api/report/FOI-R--3291--SE4.3.4 Navigeerimisega seotud kaalutlused
4.3.4.1 Nõutav olekuteave
Puhtalt aksiaalse juhtimismehhanismi korral on juhtimiseks vaja ainult asukohta ja kiirust ning GPS-ist piisaks. Esiosa juhttiibade puhul on külgjuhtimisjõu orientatsiooni määratlemiseks vaja ka juhtpindade asendi andmeid. Seda teavet võib pakkuda integreeritud GPS/INS-süsteem. Selliseid navigatsioonisüsteeme kasutatakse rutiinselt paljudes rakettides ja täppisrelvasüsteemides. Need on tänapäeval saadaval kaubanduslike valmiskomponentidena, nt. IGS-2XX seeria sügavalt integreeritud MEMS-i ja SAAM-i GPS-vastuvõtjaid, mis on vastupidavad ja segamisvastased, ettevõttelt Integrated Guidance Systems LLC (Honeywell/Rockwell Collins) (integreeritud juhtimissüsteemid)...
Teadjatele küsimus: Kas Ukrainas võis/võib olla tegu ka sellega, et laskeseadmed ise asuvad VF jammimise alas?
Liiga lähedal rindejoonele ja/või laskeseseadmetel puudub endal jammimisvastane pädev kaitse?
-
_dumbuser_
- Liige
- Postitusi: 2367
- Liitunud: 14 Jaan, 2011 0:37
- Kontakt:
Re: GPS-i häkkimine
Kui on juhitav mürsk siis laskeseadme "immuunseks" muutmine ei aita küll kuidagi. Mürsk ise on ikka segaja mõjutada. Ja seda olukorda on juba palju keerulisem kui mitte võimatu muuta. Laskeseadmele saab midagi lisada/muuta palju lihtsamalt kui mürsule.
Re: GPS-i häkkimine
Asi pole ju otseselt laskmisseadmes vaid selles, millises moona lennufaasis GNSS signaale summutatakse/segatakse/asendatakse valeandmetega.
Võtmesõnad: Initsialiseerimine, lähtepunkti asukohamäärang, trajektoori ja teekonna arvutus, INS, parandid ja lennu korrigeerimine.
Ja sinna kõrvale võiks võrrelda nt Pole-21 vms GNSS segamisvõimekusega EW võimsust, kaugust, tööraadiust (sektori asimiuuti ja kõrgust) jne.
Võtmesõnad: Initsialiseerimine, lähtepunkti asukohamäärang, trajektoori ja teekonna arvutus, INS, parandid ja lennu korrigeerimine.
Ja sinna kõrvale võiks võrrelda nt Pole-21 vms GNSS segamisvõimekusega EW võimsust, kaugust, tööraadiust (sektori asimiuuti ja kõrgust) jne.
Re: Vene-Ukraina sõda II osa
Härra vähe lugeda oskab? 2023. aasta artiklid, postitus ise on siin -
https://militaar.net:8443/phpBB2/viewto ... 32#p840832
-
_dumbuser_
- Liige
- Postitusi: 2367
- Liitunud: 14 Jaan, 2011 0:37
- Kontakt:
Re: GPS-i häkkimine
Ma vist ei saa aru aga mis paganama vahet seal on ? Või orkid uurivad millises lennufassis/olekus see mürsk parjasti on ja vastavalt siis tekitavad igale etapile eraldi või erinevaid häireid ? Ja kui neid mürske lastakse korraga palju siis peaks nagu igaühele eraldi mingi segamisinfo saatma ?Fucs kirjutas: ↑11 Mai, 2024 20:01 Asi pole ju otseselt laskmisseadmes vaid selles, millises moona lennufaasis GNSS signaale summutatakse/segatakse/asendatakse valeandmetega.
Võtmesõnad: Initsialiseerimine, lähtepunkti asukohamäärang, trajektoori ja teekonna arvutus, INS, parandid ja lennu korrigeerimine.
Ja sinna kõrvale võiks võrrelda nt Pole-21 vms GNSS segamisvõimekusega EW võimsust, kaugust, tööraadiust (sektori asimiuuti ja kõrgust) jne.
Re: GPS-i häkkimine
Teooria.
GNSS (GPS) juhitavat moona on põhimõtteliselt kahte erinavat sorti:
Spin-stabilized (nt. XM 1156)
Fin-stabilized (nt. M712 Copperhead ; M982 Excalibur)
Spin-stabilized moona iseärasuste kohta saab lugeda siit:
https://www.hindawi.com/journals/ijae/2015/908304/
Ukraina kontekstis tekkis probleem väidetavalt M982 Excalibur moonaga.
Juhitav moon vajab sihtmärgile jõudmise programmeerimiseks laskmiskohas:
* laskeseadme täpset asukohta (X;Y;Z koordinaate)
* sihtmärgi täpset asukohta (X;Y;Z koordinaate)
[algandmed, mis sisestatakse juhitavasse moona, et see saaks teha vastavaid arvutusi lennu ajal]
* algset välja arvutatud direktsiooninurka ja relva/laskeseadme suunamist selles suunas
* võimalik, et ilmastiku jms muutuvaid parameetreid (nt. tuulesuund ning tugevus).
* GPS MIL koodide (ja krüpteeritud P/Y ja M juurdepääsuparoolide/võtmete?) sisestamist
* veel midagi?
Teoreetiliselt (mina ei tea nüansse peensusteni) peaks tarkmoon juba laskeseadmes hakkama suhtlema sattidega (initsialiseerimine ja selleks kuluv aeg/vajaliku hulga sattide leidmine). Hiljemalt lasu/stardi hetkest alates ta igatahes seda tegema hakkab.
Edasi on kolm erinevat põhimõtet targa moona sihtmärgile juhtimiseks. Neid võib kasutada nii üksikult kui omavahel kombineeritult.
Põhimõtteliselt sisestatakse esmased andmed (ja tehakse initsialiseerimine?) ja siis kui moon stardib, tehakse kohe GPS initsialiseerimine kui enne pole tehtud, kogutakse muud algandmed (lennukiirus, pöörlemiskiirus, tõusunurk jne) ning tehakse vajalikud arvutused, et moon viia õigele lennutrajektoorile. Kui algandmed on valed (nt. lähtepunkti GPS koordinaadid X;Y;Z, valesti määratud põhjasuund ja direktsiooninurk, vale kiirus, vale kõrgus jne) siis arvutatakse moonale vale suund ja trajektoor. Mida kaugemal on sihtmärk seda rohkem lendab sellisel juhul moon sellest mööda + seda suurem tekib kas puudulend või ülelend.
Nüüd edasi oleneb juhtimispõhimõttest ja moona lennu suunakorrigeerimise edaspidisest vajadusest ning võimekusest.
Lisaks tuleb arvestada, et Excaliburil on ka mingi INS (inertsiaalnavi) võimekus mida saab kasutada ilma GPS toeta kui selle signaal kaob.
Osa andmeid arvutusteks tulevad pidevalt jooksvalt INS plokist ja need tulevad ka siis kui GPS signaali ei ole.
Edasi on kolm põhilist lennufaasi. Stardijärgne kiirenduse ja tippkiiruse saavutamise faas, tipufaas ja terminalifaas/lõppfaas.
Seega on GPS ja INS juhitav tarkmoon GPS jammimisele kõige haavatavam (jammimine avaldab lõpptulemusele kõige suuremat mõju) lennu algfaasis ja lennu lõppfassis. Kui jammimine/segamine toimub lennu keskmises faasis siis
a) algandmed on jätkuvalt õiged, välja on arvutatud õige direktsiooninurk, suund, teekond, trajektoor
b) keskmises faasis kadunud side GPS andmetega ei võimalda teha ülitäpseid asukohaparandusi (kui neid on vaja teha) lennu keskel, kuid moon liigub endiselt õiges suunas ja abiks on ka INS
c) lõppfaasis taastunud GPS andmeside võimaldab teha vajalikud täpisparandused ja korrigeerimised ning need jõutakse ka ellu viia, sest moon on liikunud kõigele vaatamata jämedalt võttes õiges suunas ja vajalik korrigeerimise suurus ei ole liiga suur ega ülejõu käiv.
Kui jammimine/segamine on algfaasis, siis on kõik arvutused valed, moon on viidud valele trajektoorile, valele kõrgusele, valele teekonnale, lendab vales suunas ja tekib lisaks kas puudulend või ülelend. Kui valedest algandmetest põhjustatud vead ei ole liiga suured ja hiljem mingis faasis taastub GPS side ning on võimalik moona asukohta täpselt määrata, tehakse uued arvutused ja siis suudab moon enda lendu vbl piisavalt hiljem korrigeerida, et ikkagi õigesse lõpp-punkti jõuda. Oleneb ka algtrajektoorist ja palju see erineb "tõelisest/õigest". Kui algvead on liiga suured ei suuda moon enam ennast õigele trajektoorile viia.
Kui jammimine on lõppfassis, siis algandmed on jätkuvalt õiged, välja on arvutatud õige direktsiooninurk, suund, teekond, trajektoor. Lennu keskmises faasis on saadud vajalikud täiendavad parandid lennu "peenhäälestamiseks" ja kui lõppfaasis kaobki GPS andmeside, siis INS hoiab kurssi mis oli arvutatud viimasel hetkel kui GPS andmed veel saadavad olid.
Seega teoreetiliselt on kõige hullemast variandist kõige parema variandini jammimise/signaalisegamise mõju järgmine:
* Jammitud on kõik kolm lennufaasi
* jammitud on esimene ja viimane lennufaas
* jammitud on esimene ja keskmine lennufaas
* jammitud on esimene lennufaas
* jammitud on keskmine ja viimane lennufaas
* jammitud on viimane lennufaas
* jammitud on keskmine lennufaas
* jammitud pole ükski lennufaas
Edasi vaatame olukorda vastase poolt.
Sul on 20 kriitilist objekti kuhu võib lennata tark täpismoon.
Nende kaitsmiseks oleks vaja 20 EW jaama, eraldi iga objekti lähedal, et jammida moona viimast lennufaasi ja loota, et see mõjutab piisavalt.
Kui sa paned oma ühe EW jaama "õigesse kohta" millega suudad ära jammida vastase laske/stardiseadme enda ja esimese (ja vbl ka keskmise) lennufaasi), siis kõik 20-ne objekti pihta lastud moon sellest stardiplatvormist lendab tõenäoliselt mööda. Siin oleneb jälle moonast, kas on spin-stabilized või end-stabilized jne sest neil on erinevad juhtimismeetodid ja trajektoorid ja haavatavused GPS signaali puudumisele jne.
Eelnev teooria puudutab "jammimist" ehk GPS signaali segamist/summutamist.
Kui aga on tegemist GPS spoofinguga, siis on juba hoopis teised jutud.
*
GNSS (GPS) juhitavat moona on põhimõtteliselt kahte erinavat sorti:
Spin-stabilized (nt. XM 1156)
Fin-stabilized (nt. M712 Copperhead ; M982 Excalibur)
Spin-stabilized moona iseärasuste kohta saab lugeda siit:
https://www.hindawi.com/journals/ijae/2015/908304/
Ukraina kontekstis tekkis probleem väidetavalt M982 Excalibur moonaga.
Juhitav moon vajab sihtmärgile jõudmise programmeerimiseks laskmiskohas:
* laskeseadme täpset asukohta (X;Y;Z koordinaate)
* sihtmärgi täpset asukohta (X;Y;Z koordinaate)
[algandmed, mis sisestatakse juhitavasse moona, et see saaks teha vastavaid arvutusi lennu ajal]
* algset välja arvutatud direktsiooninurka ja relva/laskeseadme suunamist selles suunas
* võimalik, et ilmastiku jms muutuvaid parameetreid (nt. tuulesuund ning tugevus).
* GPS MIL koodide (ja krüpteeritud P/Y ja M juurdepääsuparoolide/võtmete?) sisestamist
* veel midagi?
Teoreetiliselt (mina ei tea nüansse peensusteni) peaks tarkmoon juba laskeseadmes hakkama suhtlema sattidega (initsialiseerimine ja selleks kuluv aeg/vajaliku hulga sattide leidmine). Hiljemalt lasu/stardi hetkest alates ta igatahes seda tegema hakkab.
https://ndiastorage.blob.core.usgovclou ... walker.pdfEXAMPLE 100 ms PIK TO PROJECTILE MESSAGE FRAME
• Sense when Time Mark Pulse (TMP) arrives
• Read Time Mark Message from GPS receiver
• Send Time Mark Message to Projectile
• Send Target and Gun data to Projectile
• Request a Status Message from Projectile
• Receive and Process the Projectile Status
Edasi on kolm erinevat põhimõtet targa moona sihtmärgile juhtimiseks. Neid võib kasutada nii üksikult kui omavahel kombineeritult.
Ma ei hakka kogu juttu siia uuesti panema.Kolm peamist juhiste tüüpi, mida juhitava laskemoona kontekstis kõige sagedamini kasutatakse, on trajektoori kujundamine, trajektoori ennustamine ja trajektoori jälgimine.
4.1 Ennustav juhendamine
Ennustavas juhises (PG) kasutatakse igas juhiste värskendamise hetkes mürsu ja keskkonna mudelit, et arvutada välja juhtimistoimingute jada, mis annaks praeguse oleku korral sihtmärgini viiva lennutrajektoori. Kui mudelis ja mõõtmistes pole vigu (ja kõik olekud on mõõdetavad), piisab sellest ühest juhise arvutamise hetkest ja sellest tulenevast juhtimistoimingust, et anda lennutrajektoori, mis viib mürsu kuni sihtmärgini. Kuid tegelikkuses on lennu ajal vaja teha vähemalt paar sellist arvutust koos kaasneva trajektoori parandusega.
Põhimõtteliselt sisestatakse esmased andmed (ja tehakse initsialiseerimine?) ja siis kui moon stardib, tehakse kohe GPS initsialiseerimine kui enne pole tehtud, kogutakse muud algandmed (lennukiirus, pöörlemiskiirus, tõusunurk jne) ning tehakse vajalikud arvutused, et moon viia õigele lennutrajektoorile. Kui algandmed on valed (nt. lähtepunkti GPS koordinaadid X;Y;Z, valesti määratud põhjasuund ja direktsiooninurk, vale kiirus, vale kõrgus jne) siis arvutatakse moonale vale suund ja trajektoor. Mida kaugemal on sihtmärk seda rohkem lendab sellisel juhul moon sellest mööda + seda suurem tekib kas puudulend või ülelend.
Nüüd edasi oleneb juhtimispõhimõttest ja moona lennu suunakorrigeerimise edaspidisest vajadusest ning võimekusest.
Lisaks tuleb arvestada, et Excaliburil on ka mingi INS (inertsiaalnavi) võimekus mida saab kasutada ilma GPS toeta kui selle signaal kaob.
Osa andmeid arvutusteks tulevad pidevalt jooksvalt INS plokist ja need tulevad ka siis kui GPS signaali ei ole.
Edasi on kolm põhilist lennufaasi. Stardijärgne kiirenduse ja tippkiiruse saavutamise faas, tipufaas ja terminalifaas/lõppfaas.
Ülehelikiiruse faas on trajektoori osa, kus mürsk on relvale kõige lähemal ja kus on kõige lihtsam andmeid üles linkida. Üleslingi andmed võivad hõlmata mürsu tegeliku algkiiruse mõõtmisi ja mürsu asukoha ja kiiruse radarimõõtmisi. See on ka osa, kus iga inertsiaalset navigatsioonisüsteemi (INS) saab ja tuleks lähtestada ning kus GPS saab hakata satelliidiandmeid hankima.
Rõhk sõnal TÕENÄOSUS ehk, et eeldatakse, et stardiseadme juures on kõik õige ja vastane pääseb moona GPS andmeid mõjutama tõenäoliselt alles lennu lõppfassis, kuna EW vahendid on pandud sihtmärgi kaitseks.Terminali faas on lennutrajektoori viimane kolmandik.... just selles faasis on GPS signaali segamise/summutamise tõenäosus suurim, kui navigeerimiseks kasutatakse GPS-i.
Seega on GPS ja INS juhitav tarkmoon GPS jammimisele kõige haavatavam (jammimine avaldab lõpptulemusele kõige suuremat mõju) lennu algfaasis ja lennu lõppfassis. Kui jammimine/segamine toimub lennu keskmises faasis siis
a) algandmed on jätkuvalt õiged, välja on arvutatud õige direktsiooninurk, suund, teekond, trajektoor
b) keskmises faasis kadunud side GPS andmetega ei võimalda teha ülitäpseid asukohaparandusi (kui neid on vaja teha) lennu keskel, kuid moon liigub endiselt õiges suunas ja abiks on ka INS
c) lõppfaasis taastunud GPS andmeside võimaldab teha vajalikud täpisparandused ja korrigeerimised ning need jõutakse ka ellu viia, sest moon on liikunud kõigele vaatamata jämedalt võttes õiges suunas ja vajalik korrigeerimise suurus ei ole liiga suur ega ülejõu käiv.
Kui jammimine/segamine on algfaasis, siis on kõik arvutused valed, moon on viidud valele trajektoorile, valele kõrgusele, valele teekonnale, lendab vales suunas ja tekib lisaks kas puudulend või ülelend. Kui valedest algandmetest põhjustatud vead ei ole liiga suured ja hiljem mingis faasis taastub GPS side ning on võimalik moona asukohta täpselt määrata, tehakse uued arvutused ja siis suudab moon enda lendu vbl piisavalt hiljem korrigeerida, et ikkagi õigesse lõpp-punkti jõuda. Oleneb ka algtrajektoorist ja palju see erineb "tõelisest/õigest". Kui algvead on liiga suured ei suuda moon enam ennast õigele trajektoorile viia.
Kui jammimine on lõppfassis, siis algandmed on jätkuvalt õiged, välja on arvutatud õige direktsiooninurk, suund, teekond, trajektoor. Lennu keskmises faasis on saadud vajalikud täiendavad parandid lennu "peenhäälestamiseks" ja kui lõppfaasis kaobki GPS andmeside, siis INS hoiab kurssi mis oli arvutatud viimasel hetkel kui GPS andmed veel saadavad olid.
Seega teoreetiliselt on kõige hullemast variandist kõige parema variandini jammimise/signaalisegamise mõju järgmine:
* Jammitud on kõik kolm lennufaasi
* jammitud on esimene ja viimane lennufaas
* jammitud on esimene ja keskmine lennufaas
* jammitud on esimene lennufaas
* jammitud on keskmine ja viimane lennufaas
* jammitud on viimane lennufaas
* jammitud on keskmine lennufaas
* jammitud pole ükski lennufaas
Edasi vaatame olukorda vastase poolt.
Sul on 20 kriitilist objekti kuhu võib lennata tark täpismoon.
Nende kaitsmiseks oleks vaja 20 EW jaama, eraldi iga objekti lähedal, et jammida moona viimast lennufaasi ja loota, et see mõjutab piisavalt.
Kui sa paned oma ühe EW jaama "õigesse kohta" millega suudad ära jammida vastase laske/stardiseadme enda ja esimese (ja vbl ka keskmise) lennufaasi), siis kõik 20-ne objekti pihta lastud moon sellest stardiplatvormist lendab tõenäoliselt mööda. Siin oleneb jälle moonast, kas on spin-stabilized või end-stabilized jne sest neil on erinevad juhtimismeetodid ja trajektoorid ja haavatavused GPS signaali puudumisele jne.
Eelnev teooria puudutab "jammimist" ehk GPS signaali segamist/summutamist.
Kui aga on tegemist GPS spoofinguga, siis on juba hoopis teised jutud.
*
https://dspace.mit.edu/bitstream/handle ... 80-MIT.pdfA simulation of a GPS-INS guided artillery shell was used to analyze the sensitivity of miss distance to unmodeled errors in aerodynamic and environmental parameters. Based on the sensitivity analysis, a Kalman filter was designed to estimate errors in coefficient of drag, coefficient of pitching moment, initial velocity and the horizontal wind component.
These unmodeled errors, which are countered by active guidance in the presence of a GPS signal, could be ameliorated earlier in the flight if they were known, thereby reducing the impact of GPS-jamming in the final portions of flight.
1.3 GPS Jamming and the GPS/MMIMU
A typical terrestrial GPS user with a small, fixed antenna, sees less than 10- 15 W of signal power from each space vehicle. Such a low signal power at the receiver makes hostile jamming a serious concern. In fact, jammers that are man-portable and require less than 10 W are currently available on the world arms market. The possibility of widespread jamming of the GPS signal over target areas poses a potential operational problem for the SSHP in light of the relatively poor error stability of the SSHP micromechanical inertial instruments. The end effect of the relatively unstable inertial instrument errors is the loss of useful navigation data a matter of tens of seconds after the loss of GPS updates. Projected improvements in micromechanical inertial instrument performance will significantly improve this aspect of navigation performance. GPS updates are used to estimate and contain the inertial instrument errors and in the absence of these updates, the navigation solution rapidly loses practical value.
Given the necessity of GPS updates to SSHP navigation and guidance, anti-jam performance is an important consideration in the SSHP concept. Two of the possible anti-jam modifications use a segmented GPS antenna to partially isolate and identify noise. Obviously, once the local vertical has been determined and GPS has been reacquired, the antenna patches facing the sky-- and hence the GPS space vehicles--can be relied upon to have a small component of ground-noise and ground-based jamming signal. Using only those antenna patches that are facing the sky will, however, reduce the number of available space vehicles by masking those satellites that are low on the horizon and to the side of the shell. This not only has the effect of decreasing the accuracy of the GPS measurement but could possibly reduce the number of available satellites below the minimum of four. Alternatively, the design could be augmented to include a home-on-jam capability that uses the ground-facing antenna patches to identify and guide the round toward ground based jamming sites. While this may be desirable from an operational point of view, home-on-jam does not improve the accuracy of the SSHP with respect to the original target. A third anti-jam strategy would be to estimate parameters that alter the ballistic trajectory and correct the stored trajectory accordingly.
Since the guidance algorithm has no capability to determine the magnitude of these unmodeled errors and hence has no capability to correct the offset targets for them, a SSHP round in the presence of GPS jamming and modeling or environmental errors would, in effect, be an unguided artillery shell on a trajectory that does not intersect the target. That is, the trajectory used to produce the offset targets is not the path that a round would follow in the presence of aerodynamic, environmental or initial condition dispersions.
One solution to this potential problem is to estimate these errors while the navigator is receiving GPS updates and correct the intended ballistic path accordingly. An optimal--in the minimum variance sense--estimation algorithm, known as a Kalman filter, is employed to determine the value of these errors. Generally, this algorithm measures the position and velocity differences between the ballistic trajectory and the actual state of the round and calculates the combination of launch, modeling and environmental errors that are most likely to have produced the measured differences.....
Kes on foorumil
Kasutajad foorumit lugemas: Registreeritud kasutajaid pole ja 1 külaline